Rust 系统设计:这三个库正在悄悄帮你干脏活,很多程序员居然还不知道
开场:你在系统设计中踩过哪些坑?
上周有个朋友问我:「我要写个能扛几千并发的服务,光是想想要处理的事情就头大。」
我问他具体是什么事情。他说:并行处理事件流、多线程共享状态、组件之间通信、状态快照序列化。我听完就乐了,这不就是把「麻烦」换着法子说了四遍吗?
以前我也这么干过。手写序列化、自己管锁、通道和同步原语写一堆。写完一看,代码量上去了,bug 数量也跟着上去了。
后来我发现 Rust 生态里有几个 crate,把这些脏活全包了。Tokio、Crossbeam、Rkyv,今天就聊聊这仨。
原理速写:它们如何简化 Rust 系统设计?
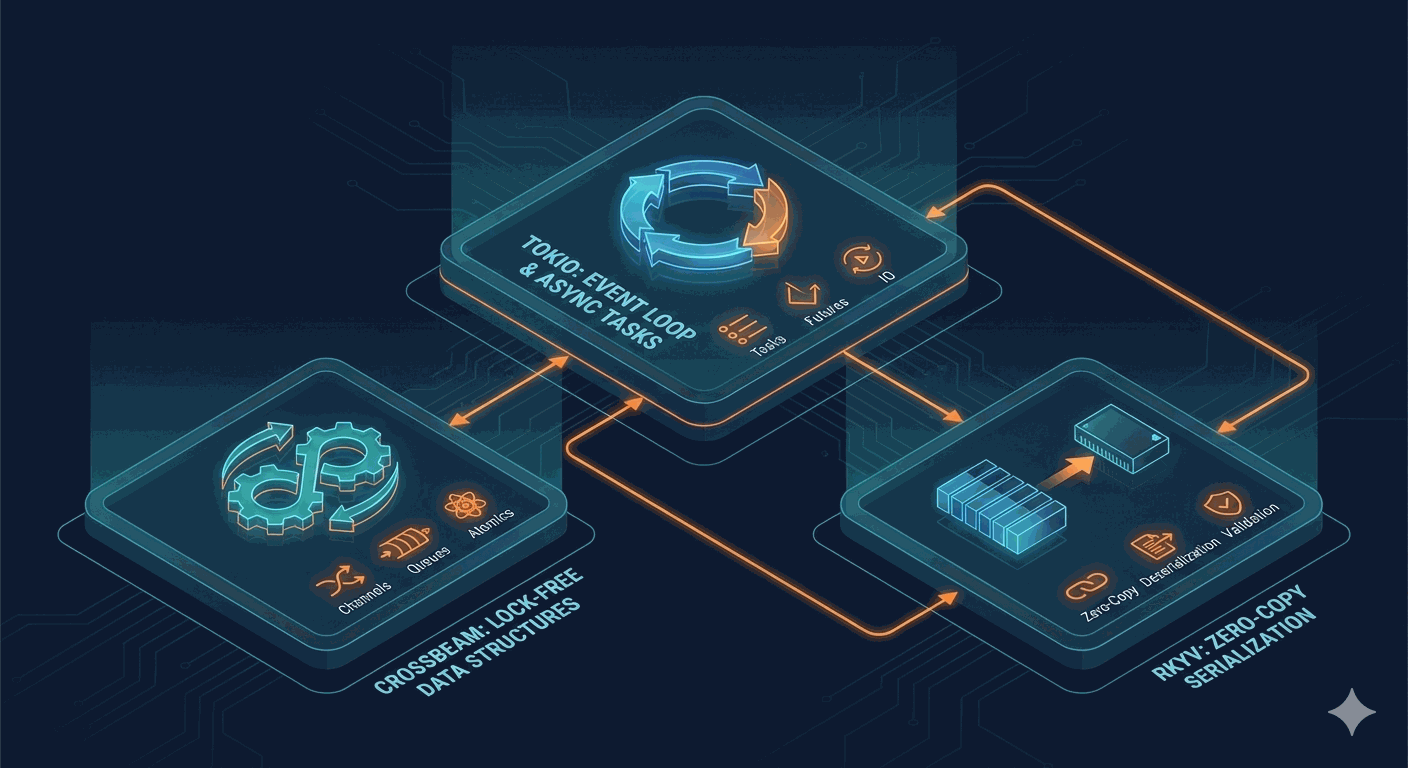
这三个库分别解决 Rust 系统设计中的三大难题。
Tokio:把异步编程变成「甩手掌柜」
在 Tokio 出现之前,写异步代码得自己管线程池、处理阻塞 I/O,一个不小心服务就挂了。
有了 Tokio 之后,你只管写业务逻辑,线程调度、事件循环、任务队列它全包了。
怎么理解?你去餐厅吃饭,不用自己跑后厨催菜、服务员记菜单、厨师安排灶台——坐等上菜就行。
Crossbeam:让多线程共享数据不再「提心吊胆」
多线程环境下共享数据就是个定时炸弹。死锁、数据竞争……随便一个都能让你凌晨三点起来修 bug。
Crossbeam 给了你无锁队列、原子数据结构、基于 epoch 的垃圾回收。你不用再纠结「这个锁该怎么加」,它从根上就让你没法写出不安全的代码。
就像有个靠谱的管家,东西往桌上一放,他自动给你收拾得服服帖帖,根本不用担心两个人同时拿同一个杯子。
Rkyv:序列化界的「闪电侠」
序列化这件事,传统方案像 serde 需要运行时开销——对象要先打包才能传输,用的时候再拆包。
Rkyv 不一样。数据往内存里一存,直接就能读,不用解包。官方说法是比 serde 快 10 倍。
怎么理解?别人家发货要装箱、封胶带、贴快递单,到了还要拆;Rkyv 相当于把东西直接扔进专用保险箱,到那边刷卡就能用。
实战:写个并发计数器试试
说了这么多,看代码最直观。
先看 Tokio 怎么处理异步编程中的任务调度:
use tokio::time::{sleep, Duration};
#[tokio::main]
async fn main() {
// 不用手动管理线程池,Tokio 全程托管
let handles: Vec<_> = (0..10).map(|i| {
tokio::spawn(async move {
println!("任务 {} 正在执行", i);
sleep(Duration::from_millis(100)).await;
i * 2
})
}).collect();
let results: Vec<_> = futures::future::join_all(handles).await;
println!("所有任务完成,结果: {:?}", results);
}
再看看 Crossbeam 的无锁队列怎么用:
use crossbeam::queue::SegQueue;
fn main() {
let queue = SegQueue::new();
// 多线程安全写入,不需要锁
queue.push(42);
queue.push(100);
// 读取也是无锁的
while let Some(val) = queue.pop() {
println!("取出: {}", val);
}
}
最后是 Rkyv 的序列化,存状态快照:
use rkyv::{Archive, Serialize, Deserialize, ser::serializers::AlignedSerializer};
use rkyv::util::AlignedVec;
#[derive(Archive, Serialize, Deserialize, Debug)]
struct SystemState {
node_count: u32,
status: String,
}
fn main() {
let state = SystemState {
node_count: 5,
status: "running".to_string(),
};
// 快速序列化,存入 buffer
let mut buffer = AlignedVec::with_capacity(256);
let mut serializer = AlignedSerializer::new(&mut buffer);
serializer.serialize_value(&state).unwrap();
let archived_bytes = serializer.into_inner();
// 直接读取存档,不需反序列化
let archived = rkyv::archived_root::<SystemState>(&archived_bytes);
println!("存档状态: node_count={}, status={}",
archived.node_count, archived.status);
}
三段代码,三个场景。并发调度用 Tokio,无锁共享用 Crossbeam,零拷贝序列化用 Rkyv。
常见坑与对策
坑一:Tokio 的 spawn 跑了却收不到结果
不 join 那些 handle,任务可能悄悄 panic 了你都不知道。spawn 出去的东西,要 join 回来才算数。
// 正确做法:join_all 确保所有任务完成
let results = futures::future::join_all(handles).await;
坑二:Crossbeam 的 Scoped Thread 记得 join
crossbeam::scope 好用,但不 join 就退出的话,Rust 会直接 panic。
// 正确做法:确保所有线程完成
crossbeam::scope(|s| {
let h = s.spawn(|_| { /* 干活 */ });
// 别忘了这个 join!
h.join().unwrap();
}).unwrap();
坑三:Rkyv 的版本兼容性
Rkyv 序列化后的数据,不同版本之间可能不兼容。生产环境记得做好数据迁移和版本校验。
总结与下一步:Rust 系统设计记住这几点就够了
这三个 crate 就像大楼的脚手架,你看不见它,但它撑起了整栋楼。
常用 API 速查:
| 库 | 核心功能 | 关键 API |
|---|---|---|
| Tokio | 异步运行时 | #[tokio::main] / tokio::spawn |
| Crossbeam | 无锁并发 | SegQueue / scope |
| Rkyv | 高效序列化 | Archive / AlignedSerializer |
下一步行动:
| 库 | 核心功能 | 关键 API |
|---|---|---|
| Tokio | 异步运行时 | #[tokio::main] / tokio::spawn |
| Crossbeam | 无锁并发 | SegQueue / scope |
| Rkyv | 高效序列化 | Archive / AlignedSerializer |
下一步行动:
cargo add tokio crossbeam rkyv 把这三个库加进项目,把现有的手动线程管理代码改用 Tokio 重写。状态持久化的场景可以试试 Rkyv 替代 serde。共享数据的地方,先想想 Crossbeam 有没有现成的无锁方案。
如果这篇文章对你有帮助,点个赞让更多人看到。转发给正在被并发问题折磨的朋友也行。有什么问题或者想法,欢迎在评论区交流。
下篇文章我们来聊聊「如何用 Rust 写一个高性能的 Web 服务」,手把手带你从零搭建一个能抗住高并发的 API 服务器。