Rust集群命令:像指挥交响乐团一样管理分布式系统
当你的分布式系统需要一个总指挥
想象一下,你刚刚组建了一个由多个音乐家组成的交响乐团——每个节点就像一位乐手,各自演奏着自己的乐器(处理着actor消息)。但是,如果突然需要让整个乐团暂停演奏,或者只让小提琴声部重新开始,你该怎么办?
这就是集群控制命令要解决的问题。在构建了基于WebSocket的分布式actor系统之后,我们需要一种方式来对整个集群发号施令,就像指挥家挥舞指挥棒一样。
定义你的指挥语言
首先,我们需要定义一套控制命令,就像指挥家的手势语言:
#[derive(Debug, Serialize, Deserialize)]
#[serde(tag = "type")]
pub enum ControlMessage {
Ping { from: String },
Shutdown,
Restart,
ScaleUp(u32), // 比如:扩展到N个工作线程
}
这些命令不是给具体的actor的,而是直接发给节点系统本身的。就像你不会告诉小提琴手如何演奏每个音符,而是通过指挥来协调整个乐团。
消息分类:演员邮件 vs 系统指令
在真实的邮件系统中,你会区分个人信件和公司公告。同样,在我们的集群中也需要区分不同类型的消息:
#[derive(Debug, Serialize, Deserialize)]
#[serde(tag = "kind")]
pub enum ClusterPacket {
Actor(NetworkMessage), // 演员之间的消息
Control(ControlMessage), // 系统控制命令
Event(ClusterEvent), // 集群事件(来自第六部分)
}
这样设计的好处是,接收方一眼就能看出这是什么类型的消息,就像看到信封上的"急件"标记一样。
建立命令处理中心
在每个节点的WebSocket服务器中,我们需要一个中央调度室来处理不同类型的消息:
match serde_json::from_str::<ClusterPacket>(&msg_str) {
Ok(ClusterPacket::Actor(actor_msg)) => {
// 发送给本地actor——这是演员之间的对话
...
}
Ok(ClusterPacket::Control(control_msg)) => {
handle_control(control_msg).await; // 系统指令,需要特殊处理
}
Ok(ClusterPacket::Event(event)) => {
handle_gossip(event, &cluster_map).await; // 集群八卦消息
}
Err(err) => {
println!("❌ 解析集群消息失败: {err}");
}
}
实现命令处理器
现在让我们来实现具体的命令处理逻辑。这就像是给每个节点配备了一个聪明的助理,知道如何执行各种指令:
async fn handle_control(msg: ControlMessage) {
match msg {
ControlMessage::Ping { from } => {
println!("📡 收到来自 {from} 的ping");
// 就像听到"测试,测试,1-2-3"的回应
}
ControlMessage::Shutdown => {
println!("🛑 收到关机指令,正在退出...");
std::process::exit(0); // 优雅地谢幕
}
ControlMessage::Restart => {
println!("🔄 重启触发!(尚未实现)");
// 就像中场休息后重新开始演奏
}
ControlMessage::ScaleUp(n) => {
println!("📈 扩展到 {n} 个工作线程!");
// 招募更多乐手加入乐团
}
}
}
发送命令:拿起你的指挥棒
有了命令定义和处理逻辑,现在我们需要能够发送这些命令。在ClusterClient中添加发送功能:
impl ClusterClient {
pub async fn send_control(&self, node_id: &str, cmd: ControlMessage) {
if let Some(peer) = self.peers.read().unwrap().get(node_id) {
let packet = ClusterPacket::Control(cmd);
let json = serde_json::to_string(&packet).unwrap();
peer.send(json).await; // 精准指挥特定乐手
} else {
println!("🚫 节点 {node_id} 未连接");
// 就像指挥棒指向了一个空座位
}
}
pub async fn broadcast_control(&self, cmd: ControlMessage) {
let packet = ClusterPacket::Control(cmd);
let json = serde_json::to_string(&packet).unwrap();
for peer in self.peers.read().unwrap().values() {
peer.send(json.clone()).await; // 对全场发号施令
}
}
}
实战演练:让集群听从指挥
现在让我们来实际使用这些控制命令:
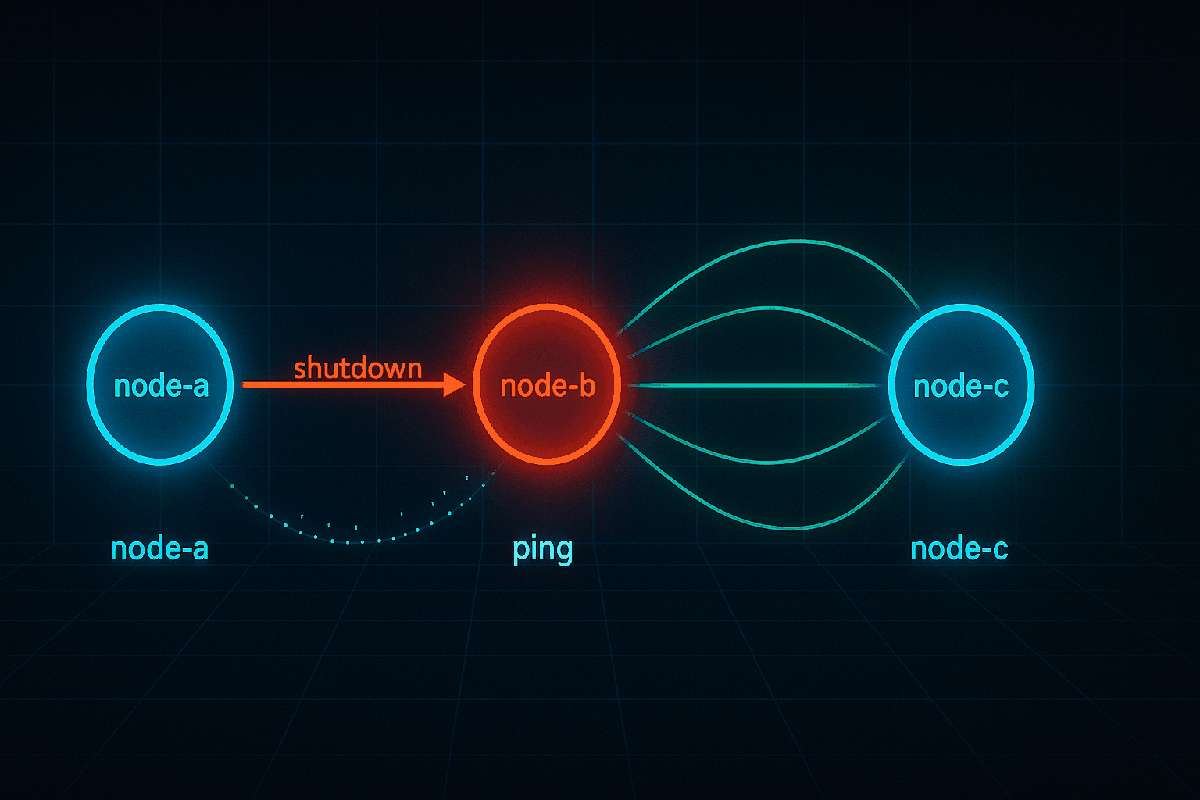
让节点B优雅关机:
cluster.send_control("node-b", ControlMessage::Shutdown).await;
向所有节点发送ping:
cluster.broadcast_control(ControlMessage::Ping { from: "node-a".into() }).await;
你会看到这样的输出:
📡 收到来自 node-a 的ping
🛑 收到关机指令,正在退出...
经验之谈:我在实际项目中踩过的坑
权限控制很重要:不是每个节点都应该能发送关机命令。在实际项目中,我建议添加签名验证,就像音乐厅的保安只会放行真正的指挥家。
优雅停机是关键:直接调用
std::process::exit(0)虽然简单,但在生产环境中最好先完成当前任务,释放资源,就像乐手会奏完当前小节再放下乐器。考虑添加确认机制:重要的命令应该等待确认回复,就像指挥会期待乐手用眼神回应"收到指令"。
扩展思路:让你的指挥棒更强大
- 心跳检测:定期发送
Heartbeat消息进行健康检查,就像指挥不时用目光扫视各个声部 - 状态查询:添加
VersionInfo、Status或Metrics消息来获取节点状态 - 动态平衡:实现
"rebalance"命令来重新分配分片工作 - 配置同步:通过控制通道广播配置变更
总结
通过实现集群控制命令,我们为分布式系统添加了一个强大的管理层面。这就像给交响乐团配备了一位专业的指挥家,能够精准地控制每个乐手的表现。
| 功能 | 描述 |
|---|---|
ControlMessage | 节点系统命令(关机、ping等) |
ClusterPacket | 消息包装器(Actor、Control、Event) |
send_control() | 定向控制消息 |
broadcast_control() | 广播到所有连接节点 |
handle_control() | 执行节点级别的操作 |
记住,好的系统设计就像好的音乐——既需要每个部分的精湛表演,也需要整体的协调统一。现在拿起你的指挥棒,开始管理你的分布式交响乐团吧!
如果觉得这篇文章对你有帮助,欢迎关注我的专栏,我会继续分享更多Rust和分布式系统的实战经验。